# Работа с учебными наборами IoT от Unwired Devices
## Предисловие
Вузы-участники программы [IT Академия Samsung](https://myitacademy.ru) в 2017 – 2018 гг. для изучения технологий интернета вещей комплектовались учебными
наборами отечественного производства. Выпускала их компании ["ООО "Беспроводные технологии"](https://www.unwireddevices.com/) ([Unwired Devices](https://www.unwireddevices.com/)).
Эти наборы обладают рядом плюсов:
- низкая стоимость;
- интегрированный модуль: микроконтроллер + модуль связи LoRa;
- есть готовый стек LoRaWAN и драйверы для внешних устройств.
К сожалению, они больше не выпускаются, и вузы-участники программы IT Академия Samsung постепенно перешли на новые учебные комплекты,
работа с которыми и описывается в системе обучения [innovationcampus.ru](https://innovationcampus.ru/).
Поскольку приобретение оборудование в бюджетной организации — это достаточно длительный процесс, связанный с финансированием, организацией тендера на закупку и прочими организационными вопросами,
мы адаптировали курс "Интернет вещей" для использования с имеющимся в нашем распоряжении оборудованием.
## Unwired Devices Kit<a name="kit"></a>
Учебные наборы от [Unwired Devices](https://www.unwireddevices.com/) содержат достаточно большой набор компонентов,
но нас в первую очередь будут интересовать два:
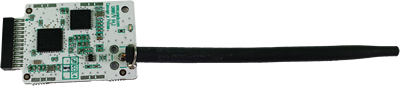
* радиомодуль Unwired Range (UNWR);
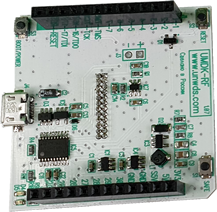
* плата-адаптер (UMDK-RF).
Радиомодуль Unwired Range (подписан на плате как UNWR) содержит в себе микроконтроллер STM32
и приемопередатчик LoRa, и, таким образом, сам по себе является минимальным конечным устройством "Интернета вещей".
К плате-адаптеру UMDK-RF можно подключать различные радиомодули (например, тот же UNWR).
Разъём для них расположен снизу. А также различные датчики и исполнительные устройства (разъемы сверху).
Помимо этого, на этой плате находятся:
* зеленый светодиоды **D4**
* красный светодиоды **D5**
* кнопка **BOOT/POWER**
* кнопка **RESET**
* кнопка **SAFE**
Для включения модуля UMDK-RF (v1.07) достаточно подать на него питание через расположенный на плате разъем micro-USB.
Если после подключения кабеля USB загорается зелёный светодиод **D4**, модуль работает в штатном режиме.
Управление модулем:
* короткое нажатие на кнопку **BOOT/POWER** — включение/выключение питания;
* длинное нажатие (более 2 секунд) — ввод радио-модуля в режим программирования по UART;
* кнопка **SAFE** подключена к порту `PB_1`, и может использоваться в программах аналогично `USER_BUTTON`.
Световая индикация:
* медленное мигание зелёного светодиода — радио-модуль в режиме программирования по UART;
* быстрое мигание зеленого светодиода — короткое замыкание на выходе 5 В;
* мигание красного — активность модуля.
Кроме того, на плате радиомодуля UNWR расположен красный светодиод, подключенный к порту `PB_0`, который можно использовать аналогично `LED1`.
Мы не планируем сейчас использовать модуль связи LoRa – нам нужен на первых порах только микроконтроллер серии STM32.
Тем не менее, посмотрите [документацию](https://unwireddevices.com/docs/) на этот набор оборудования,
возможно, некоторые задачи в этом учебном году мы заменим аналогичными прошлых лет.
Итак, соедините радиомодуль UNWR и плату-адаптер UMDK-RF. Обратите внимание, что у платы UNWR микросхемы должны быть направлены вниз.
<div class="danger">
Аккуратно обращайтесь с антенной, она может сломаться.<br />
Не менее важно правильно обращаться с линейками штырьков, соединяющими платы между собой: они тонкие, и их легко погнуть.
</div>
У нас должна получиться такая конструкция:
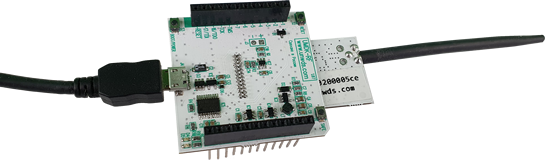
Теперь аппаратная часть у нас готова для начала работы!
## Среда разработки<a name="pio"></a>
В настоящий момент времени курс Интернет вещей [IT Академии Samsung](https://myitacademy.ru) предполагает использование в качестве
базовой среды разработки [PlatformIO](https://platformio.org). По сути это надстройка, которая может быть применена к большинству популярных IDE.
Как и авторы курса мы будем использовать VSCode.

### Установка PlatformIO
Если у вас современная операционная система (Windows 8/8.1/10/11 или Ubuntu 20.04 или новее), то проблем с установкой быть не должно. Тут все достаточно просто:
1. Установить [VSCode](https://code.visualstudio.com/) для своей операционной системы.
2. Установить расширение PlatformIO – это делается через менеджер расширений внутри VSCode.
3. Перезапустить VSCode.
Если у вас Windows 7, то вам нужно скачивать более раннюю версию VSCode, а именно [1.70.3](https://code.visualstudio.com/updates/v1_70). Сделать это можно со странички **Updates** или перейдя по ссылке [https://code.visualstudio.com/updates/v1_70](https://code.visualstudio.com/updates/v1_70).
Если же вы работаете с Ubuntu 18.04 (а именно такая версия операционной системы установлена у нас в лаборатории интернета вещей), то здесь тоже есть свои сложности.
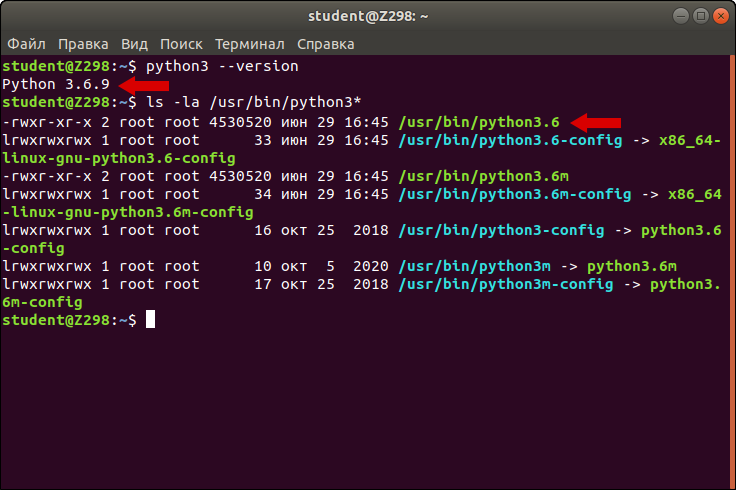
Все дело в том, что для успешной работы PlatformIO с нашим оборудованием необходима версия Python как минимум 3.9, но последняя официальная сборка для Ubuntu 18.04 – это Python 3.6.9.
Причем, если принудительно обновить версию Python, то перестает работать множество системных приложений - порой отказывается работать даже Терминал!
Как быть? Следовать инструкции ниже!
1. Установите PlatformIO, как указано в основном курсе IT Академии.
2. При создании нового проекта укажите плату ST Nucleo L152RE и фреймворк Mbed.
3. Если вы не получили никаких ошибок, то все Ок, и дальнейшие шаги можно пропустить.
4. **Закройте Visual Studio Code**.
5. Откройте приложение Терминал, и в нем наберите следующие команды:
```
python3 --version
ls /usr/bin/python3*
```
6. Запомните версии установленных приложений Python (скорее-всего это будет 3.6.9).
7. Нам нужно установить более новую версию Python. На текущий момент лучше всего подойдет версия 3.10, поэтому в том же Терминале введите:
```
sudo apt update
sudo apt install software-properties-common -y
sudo add-apt-repository ppa:deadsnakes/ppa
sudo apt update
sudo apt install python3.8 python3.8-venv python3-pip python3-venv
```
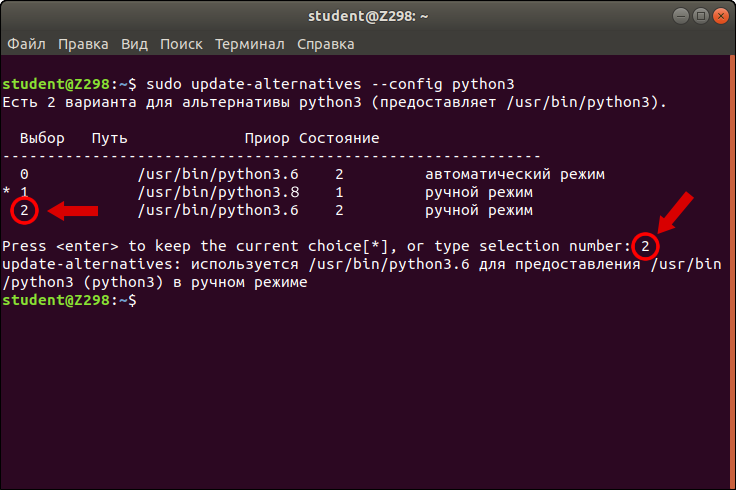
8. Теперь сконфигурируйте систему на использование новой версии Python. Для этого в Терминале введите:
```
sudo update-alternatives --install /usr/bin/python3 python3 /usr/bin/python3.6 1
sudo update-alternatives --install /usr/bin/python3 python3 /usr/bin/python3.8 2
sudo update-alternatives --config python3
```
9. В ответ на появившийся запрос укажите номер, соответствующий **новой** версии Python.
10. Запустите Visual Studio Code, дождитесь обновления PlatformIO.
11. Попытайтесь снова создать проект с платой ST Nucleo L152RE и фреймворком Mbed. На этот раз должно получиться!
12. **Закройте Visual Studio Code**.
13. В Терминале перейдите в каталог с настройками PlatformIO:
```
cd ~/.platformio/penv/bin
```
14. Установите использование новой версии Python для PlatformIO:
```
unlink python3
ln -s /usr/bin/python3.8 python3
```
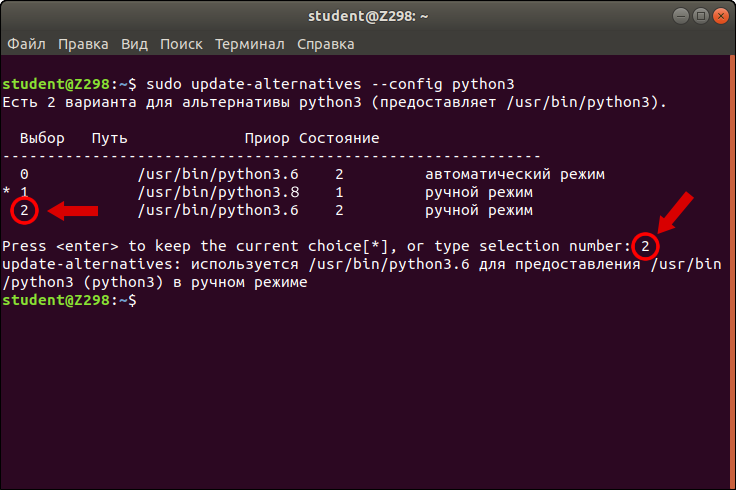
15. Восстановите прежнюю версию Python для использования ее в системе по умолчанию:
```
sudo update-alternatives --config python3
```
16. В ответ на появившийся запрос укажите номер, соответствующий **прежней** версии Python (3.6).
17. Все, теперь можно работать!
## Первая программа<a name="hello"></a>
Следуя за авторами любого языка программирования, первая программа – это всегда **Hello World**.
Если же говорить о встраиваемых системах и программах для микроконтроллеров, то часто такая программа это **Blink** – программа, мигающая светодиодом. Собствено сделем и то, и другое!
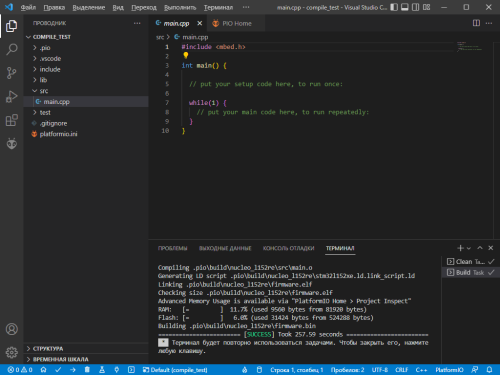
Создадим в PlatformIO новый проект для платы *ST Nucleo L152RE* с использованием фреймворка *Mbed*
(или откроем в PlatformIO наш проект, на котором проверяли работоспособность PlatformIO, если вдруг его успели закрыть),
перейдем к каталогу `src` и откроеем файл `main.cpp` на редактирование, и изменим его содержимое:
```
#include "mbed.h"
DigitalOut led (LED1);
int main() {
// put your setup code here, to run once:
int i = 0;
led = 0;
printf("Hello World !\n");
while(1) {
// put your main code here, to run repeatedly:
ThisThread::sleep_for(1s);
led = !led;
printf("This program runs since %d seconds.\n", i++);
}
}
```
Это простая программа, которая:
* напечатает сообщение Hello World (его можно будет видеть, если подключиться к плате по последовательному порту связи программой-монитором;
* будет мигать светодиодом 1 раз в секунду;
* будет выводить в последовательный порт число секунд, прошедших с момента запуска программы.
<div class="info">
Обратите внимание, что листинг этой программы несколько отличается от того, что предложен на сегодня (10.10.2022 г.) на сайте IT Академии, так как некоторые инструкции являются устаревшими и больше не работают в Mbed 6-й версии!
</div>
И еще несколько замечаний об использовании PlatformIO.
1. Это особенно важно для тех, кто работает под **Windows**: В полном пути к файлам проекта **не должно** быть символов, отличных от латинице.
Собственно по умолчанию PlatformIO создает проекты в каталоге `Documents\PlatformIO\Projects` пользователя.
То есть, если, скажем, у вас имя пользователя **Пользователь**, то это приведет к тому, что файлы будут размещаться в большинстве случаев
по пути `C:\Users\Пользователь\Documents\PlatformIO\Projects`, а с такими именами компиляция программы завершится ошибкой!
Под **Linux** такой проблемы нет!
2. Проекты в PlatformIO имееют свою структуру. Исходные файлы, содержащие код программы, нужно размещать в каталоге `src`,
заголовочные файлы, созданные пользователем, – в каталоге `include`. Если в проекте используются библиотеки, то **каждая**
библиотека должна находиться в своем собственном каталоге внутри каталога `lib`.
### Компиляция программы<a name="build"></a>
Если бы у нас были в распоряжении *типовые* отладочные платы (те же ST Nucleo L152RE), то работа c PlatformIO была бы тоже типовой (и расписана в курсе IT Академии).
Реальные же проекты редко когда выполняются на отладочных платах – у таких плат совершенно иная, очевидная из названия, задача. Соответственно, можно сказать, что нам повезло:
имея в своем рапоряжении платы Unwired Range, и научившись их подключать к среде разработки, в дальнейшем можно будет аналогичным образом подключить и любую свою плату
(Mbed и PlatformIO позволяют работать с *custom boards* – платами, отличающимися от официально поддерживаемых).
Что же для этого нужно? Если вкратце, то:
1. Научить фреймворк Mbed "понимать" платы Unwired Range;
2. Научить PlatformIO "понимать" платы Unwired Range;
3. Сконфигурировать программу на использование платы Unwired Range.
<div class="validation">
Есть несколько способов сделать все это, но остановимся на каком-то одном, наиболее простом способе (но все равно перед тем, как это делать, **дочитайте** материал до конца).
</div>
Конечно, платы от Unwired Devices не поддерживаются ни Mbed, ни PlatformIO, но мы создали описание платы Unwired Range для Mbed – создали таргет **UNWIRED_RANGE**!
Этот таргет наша [собственная](https://github.com/iot-academy/mbed-os_unwr_target) инициатива, и в нем могут содержаться ошибки, но это лучше, чем ничего, а ошибки мы исправим!
Скачать таргет можно либо из нашего [репозитория](https://github.com/iot-academy/mbed-os_unwr_target), либо с этого сайта по ссылкам:
* [unwr.tar.gz для Mbed v.6.x](https://aiu.susu.ru/assets/components/fileattach/connector.php?action=web/download&ctx=web&fid=54kRpayReHGDm7U2GJmHMndzqmF1iAYn)
* [unwr.tar.gz для Mbed v.5.x](https://aiu.susu.ru/assets/components/fileattach/connector.php?action=web/download&ctx=web&fid=tURKEqMK1Zea6HJFUZSuvMItEOwtbZGF)
Для работы с PlatformIO **следует использовать версию 6.x!**
Чтобы справиться с *первой* задачей, необходимо в корне своего проекта (рядом с файлом `platformio.ini`) разместить файл `custom_targets.json` из архива с таргетом **UNWIRED_RANGE**,
а в каталоге `src` разместить каталог `TARGET_UNWIRED_RANGE` из того же архива.
Для решения *второй* задачи в каталоге проекта PlatformIO нужно создать папку `boards` и разместить в ней файл `unwired_range.json` следующего содержания:
```
{
"build": {
"cpu": "cortex-m3",
"extra_flags": "-DSTM32L151xC",
"f_cpu": "24000000L",
"mcu": "stm32l151ccu6",
"product_line": "STM32L151xC"
},
"debug": {
"default_tools": [
"cmsis-dap"
],
"jlink_device": "STM32L151CC",
"openocd_extra_args": [
"-c", "cmsis_dap_vid_pid 0x1209 0xda42",
"-c", "reset_config srst_only"
],
"openocd_target": "stm32l1x_dual_bank",
"svd_path": "STM32L15xC.svd"
},
"frameworks": [
"cmsis",
"mbed",
"stm32cube",
"libopencm3"
],
"name": "Unwired Range",
"upload": {
"maximum_ram_size": 81920,
"maximum_size": 262144,
"protocol": "cmsis-dap",
"protocols": [
"jlink",
"cmsis-dap",
"stlink"
]
},
"url": "https://aiu.susu.ru/iot/samsung/",
"vendor": "UMDK"
}
```
И для решения *третьей* задачи нужно в файле `platformio.ini` указать использование нашей платы и таргета:
```
[env:unwired_range]
platform = ststm32
board = unwired_range
framework = mbed
build_flags =
-I$PROJECT_SRC_DIR/TARGET_UNWIRED_RANGE
```
<div class="best">
Для упрощения работы в будущем можно не создавать новый проект в PlatformIO, а создавать в каталоге проекта папку,
брать архив [pio_unwr.zip](https://aiu.susu.ru/assets/components/fileattach/connector.php?action=web/download&ctx=web&fid=JC1v926ByoJN4gK28LO4yj_DFi7ut9Zc),
распоковывать его в эту папку, а в PlatformIO открывать существующий проект, ибо в архиве как раз и содержится минимальный проект для нашей платы со всей необходимой структурой
каталогов и настройками.
</div>
Сразу же можно дополнить (или отредактировать) секцию `[env:unwired_range]` файла `platformio.ini` настройками подключения к плате.
Первоначальные настройки архиве [pio_unwr.zip](https://aiu.susu.ru/assets/components/fileattach/connector.php?action=web/download&ctx=web&fid=JC1v926ByoJN4gK28LO4yj_DFi7ut9Zc)
подойдут для работы у нас в лаборатории. В иных случаях ряд настроек нужно будет откорректировать, так как они зависят от операционной системы и от того,
как плата Unwired Range определилась в системе.
Под **Windows** посмотрите в *Диспетчере устройств*, какие новые последовательные порты у вас появились при подключении платы (их должно быть два, и в разных
версиях операционной системы они могут называться по-разному). Нас интересует порт с **меньшим** номером.
 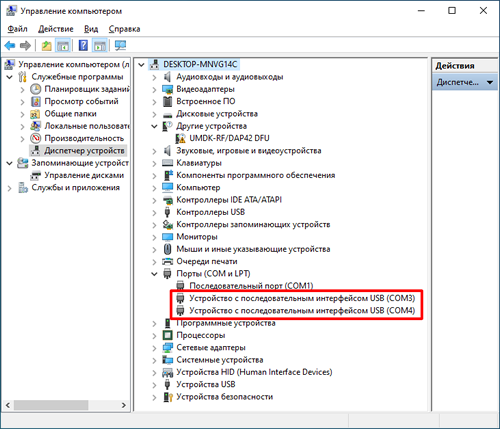
Для определенности пусть это будут порты COM3 и COM4, тогда в `platformio.ini` нужно добавить строки:
```
upload_port = COM3
monitor_port = COM3
```
В операционной системе **Linux** (Ubuntu) наша плата должна определиться как `/dev/ttyACM0` и `/dev/ttyACM1`. Это тоже нужно проверить, например, командой в Терминале:
```
ls -la /dev/tty*
```
и так же в `platformio.ini` добавить устройство с меньшим номером:
```
upload_port = /dev/ttyACM0
monitor_port = /dev/ttyACM0
```
Под **MacOS** будет что-то похожее, но со своими особенностями, например, `/dev/tty.usbmodem411`, и тогда
в `platformio.ini` должно быть:
```
upload_port = /dev/tty.usbmodem411
monitor_port = /dev/tty.usbmodem411
```
Теперь можно компилировать и загружать прошивку в плату конроллера.
### Загрузка программы в плату Unwired Range<a name="flash"></a>
Платы семейства [STM32Nucleo](https://www.st.com/en/evaluation-tools/stm32-nucleo-boards.html), на основе которых в курсе IT Академии рекомендуется выполнять лабораторные работы, в своем составе содержат программатор ST-Link/v2-1.
Его назначение – загрузить программу в память микроконтроллера. Для отладочной платы это хорошо, но в каком-то готовом изделии наличие аппаратного программатора – это фактически пустая трата денег на ненужные детали.
Поэтому очень часто аппаратные программаторы для микроконтроллеров выпускаются отдельно. Например, тот же ST-Link может выглядеть так:

Вообще можно использовать любой программатор, лишь бы он справлялся со своей задачей.
В отладочной плате (или учебном наборе) без программатора не обойтись.
И платы Unwired Devices также в своем составе имеют программатор. Собственно плата-адаптер UMDK-RF – это
и есть прежде всего программатор, основанный на открытом проекте [DAP42](https://github.com/devanlai/dap42).
Чтобы в PlatformIO можно было работать напрямую с программаторами, подключаемыми по интерфейсу USB,
на Linux нужно сделать несколько настроек.
Во-первых, добавить пользователя в группы `dialout` и `plugdev` для Ubuntu, Mint и других операционках,
основанных на Debian. В Терминале набираем:
```
sudo usermod -a -G dialout $USER
sudo usermod -a -G plugdev $USER
```
Или в группы `uucp` и `lock` для пользователей Arch:
```
sudo usermod -a -G uucp $USER
sudo usermod -a -G lock $USER
```
Во-вторых, нужно установить udev-правила и активировать их, чтобы PlatformIO получило доступ
к поддерживаемым платам. Последняя версия правил доступна на [https://raw.githubusercontent.com/platformio/platformio-core/develop/platformio/assets/system/99-platformio-udev.rules](https://raw.githubusercontent.com/platformio/platformio-core/develop/platformio/assets/system/99-platformio-udev.rules).
Если у вас не установлен `curl`, то устанавливаем его (набираем в Терминале):
```
sudo apt install curl
```
Скачиваем правила:
```
curl -fsSL https://raw.githubusercontent.com/platformio/platformio-core/develop/platformio/assets/system/99-platformio-udev.rules | sudo tee /etc/udev/rules.d/99-platformio-udev.rules
```
Перезапускаем службу `udev`:
```
sudo service udev restart
# или
sudo udevadm control --reload-rules
sudo udevadm trigger
```
Подключите плату-адаптер UMDK-RF с подключенным радиомодулем UNWR к компьютеру, используя micro-USB кабель.
В современных Linux поддержка преобразователя USB-UART для этой платы встроена на уровне ядра,
так что ничего дополнительно устанавливать не нужно – драйвера установятся автоматически.
Но при первом подключении к компьютеру, светодиоды **D4** и **D5**, установленные на плате-адаптере UMDK-RF, возможно,
будут часто мигать в процессе инициализации платы и установки драйверов. Как только плата "промигается", она готова к работе.
Приведём последовательность действий, необходимых для загрузки прошивки:
1. Подключить плату к компьютеру.
2. Если плата включена, коротким нажатием (мене 2 секунд) на кнопку **BOOT/POWER** выключить её.
3. Включить плату коротким нажатием (мене 2 секунд) на кнопку **BOOT/POWER**.
4. Как можно скорее длинным нажатием (более 2 секунд) на кнопку **BOOT/POWER** перевести плату в режим программирования (зеленый светодиод **D4** начнет мигать с равными интервалами).
5. Запустить в PlatformIO прошивку платы (стрелка вправо на панели инструментов).

6. Длинным нажатием (более 2 секунд) на кнопку **BOOT/POWER** перевести плату в обычный режим работы (зеленый светодиод **D4** светится постоянно).
#### Примечание
Собственно зачем выключать и снова включать плату (п. 2 и п. 3)? Скорее всего в нашем случае в этом нет необходимости.
Однако оригинальная прошивка для плат Unwired Range в своей работе использует порты, через которые осуществляется её переключение в режим программирования.
Поэтому перевести плату с такой прошивкой в режим программирования возможно только до того, как она полностью проинициализировалась.
Если установлена какая-то другая прошивка, то лишний раз плату можно и не выключать, достаочно длинным нажатием на **BOOT/POWER** перевести плату в режим программирования.

## Долгая компиляция<a name="mbedignore"></a>
Обратили внимание, что процесс компиляции программы занимает о-о-о-о-очень много времени?
1. Говорят, что на Linux компиляция происходит значительно быстрее, чем под Windows.
Для примера время компиляции "пустой" программы под Windows 10 20H2 и Ubuntu 18.04 на одном и том же компьютере
(Intel(R) Xeon(R) CPU E5-2678 v3 2.50 GHz 16,0 Гб) 258 с и 65 с соответственно! При этом Windows
работает с SSD (NVME SSD 256GB), а Ubuntu – только с со стареньким и медленны HDD (FUJITSU MHV2200BT)!
[](/assets/images/iot-academy/pio_compile_win10.png)
[](/assets/images/iot-academy/pio_compile_ubuntu1804.png)
Так что можно проверить – свободные компьютеры в аудитории есть.
2. Последующая компиляция, если не меняются файлы `platformio.ini`, `mbed_app.json` занимает существенно меньше времени.
3. Можно еще ускорить время компиляции, и не компилировать отдельные модули Mbed, благо разработчики предусмотрели такую возможность.
Вообще с этой целью нужно создать файл `.mbedignore` в каталоге с библиотекой Mbed, и указать в нем какие файлы и каталоги не нужно компилировать.
Но это не работает при использовании PlatformIO! Тем не менее, выход есть!
[Kacper Kowalski](https://github.com/KKoovalsky) предложил способ, который к тому же позволяет для каждого проекта в PlatformIO иметь
свои собственные исключения при компиляции Mbed – это его проект [PlatformIO-Helpers](https://github.com/KKoovalsky/PlatformIO-Helpers).
Однако, нам больше нравится его [ответление](https://github.com/Copper-Bot/PlatformIO-Helpers), в котором есть несколько улучшений.
Что нужно сделать, чтобы сократить время компиляции?
<div class="danger">
Вы должны буть абсолютно уверенными в своих действиях! Представленный здесь подход затрагивает глобальные настройки процедуры сборки Mbed OS в PlatformIO,
и при создании нового проекта можно будет столкнуться с ощибками, связанными с "оптимизацией" процесса компиляции предыдущего проекта!
</div>
- Установить систему контроля версий Git, если она у вас еще не установлена. В Ubuntu это можно сделать так:
```
sudo apt install git
```
- Перейти в каталог с фреймворком Mbed:
```
cd ~/.platformio/packages/framework-mbed
```
- Поместить текущее состояние фреймворка под управление системы контроля версий Git:
```
git init
git add .
git commit -m "Initial state"
```
- В файл `platformio.ini` добавить строку:
```
extra_scripts = pre:mbedignore.py
```
- В корень проекта добавить файл (кликабельно) [`mbedignore.py`](https://raw.githubusercontent.com/Copper-Bot/PlatformIO-Helpers/master/mbedignore.py)
- В корне проекта создать файл `.mbedignore`, в котором указать каталоги библиотеки Mbed, которые не нужно компилировать в данном проекте:
```
connectivity/drivers/802.15.4_RF
connectivity/drivers/ble
connectivity/drivers/cellular
connectivity/drivers/emac
connectivity/drivers/lora
connectivity/drivers/mbedtls
connectivity/drivers/nfc
connectivity/drivers/wifi
connectivity/cellular
connectivity/libraries
connectivity/lorawan
connectivity/lwipstack
connectivity/mbedtls
connectivity/nanostack
connectivity/netsocket
connectivity/nfc
features/frameworks
storage/kvstore
```
Как это работает? Непосредственно в самом Mbed можно запретить компилировать отдельные каталоги при помощи файла `.mbedignore`, в котором прописывается путь
к каталогу и файлам, которые нужно исключить из процесса сборки. Символ `*` (звездочка) в таком файле запрещает компиляцию всего содержимого каталога,
в котором находится такой файл `.mbedignore`. В PlatformIO нет полной поддержки синтаксиса таких файлов, и еще меньше в предлагаемом скрипте.
Этот скрипт (`mbedignore.py`) считывает файл `.mbedignore` в корне проекта и по указанным в нем путям создает новые файлы `.mbedignore` с запретом компиляции всего (то есть `*`).
Соответственно, раз в каталог с Mbed добавляются новые файлы, запрещающие компиляцию некоторых частей этого фреймворка, то при создании **нового** проекта в PlatformIO
можно столкнуться с тем, что некоторые нужные компоненты Mbed так и не компилируются. В этой ситуации нужно либо вручную удалить все созданные скриптом `mbedignore.py`
файлы `.mbedignore` (что достаточно тяжело), либо заставить сам скрипт `mbedignore.py` удалить файлы`.mbedignore` в структуре каталогов Mbed (создав пустой файл `.mbedignore` в корне своего проекта,
но это работает не всегда), либо "откатить" все изменения в каталоге фреймворка Mbed при помощи системы контроля версий Git
(благо мы в самом начале поместили фреймворк под контроль этой системы).
Сделать это можно следующим образом в Терминале:
```shell
cd ~/.platformio/packages/framework-mbed
git reset --hard HEAD
```
## Что дальше?
Таким образом, мы фактически выполнили [пункт 1.1.2](https://innovationcampus.ru/lms/mod/book/view.php?id=1319&chapterid=1112) нашей [лабораторной работы 1.1](https://innovationcampus.ru/lms/mod/book/view.php?id=1319) на доступном для нас оборудовании.
Соответственно, задача сведена к известной, и можно приступать к выполнению очередных частей практикума, модифицируя предлагаемые примеры самостоятельно.